⚙️ Architecture & Hardware
Visual Overview
Badmobile is built on a custom differential-drive chassis designed for stability and rapid rotation. The center of mass is kept low to prevent tipping during high-speed collisions.
Design Note: The chassis protects the central brick while ensuring the Ultrasonic sensor has a clear 180° field of view.
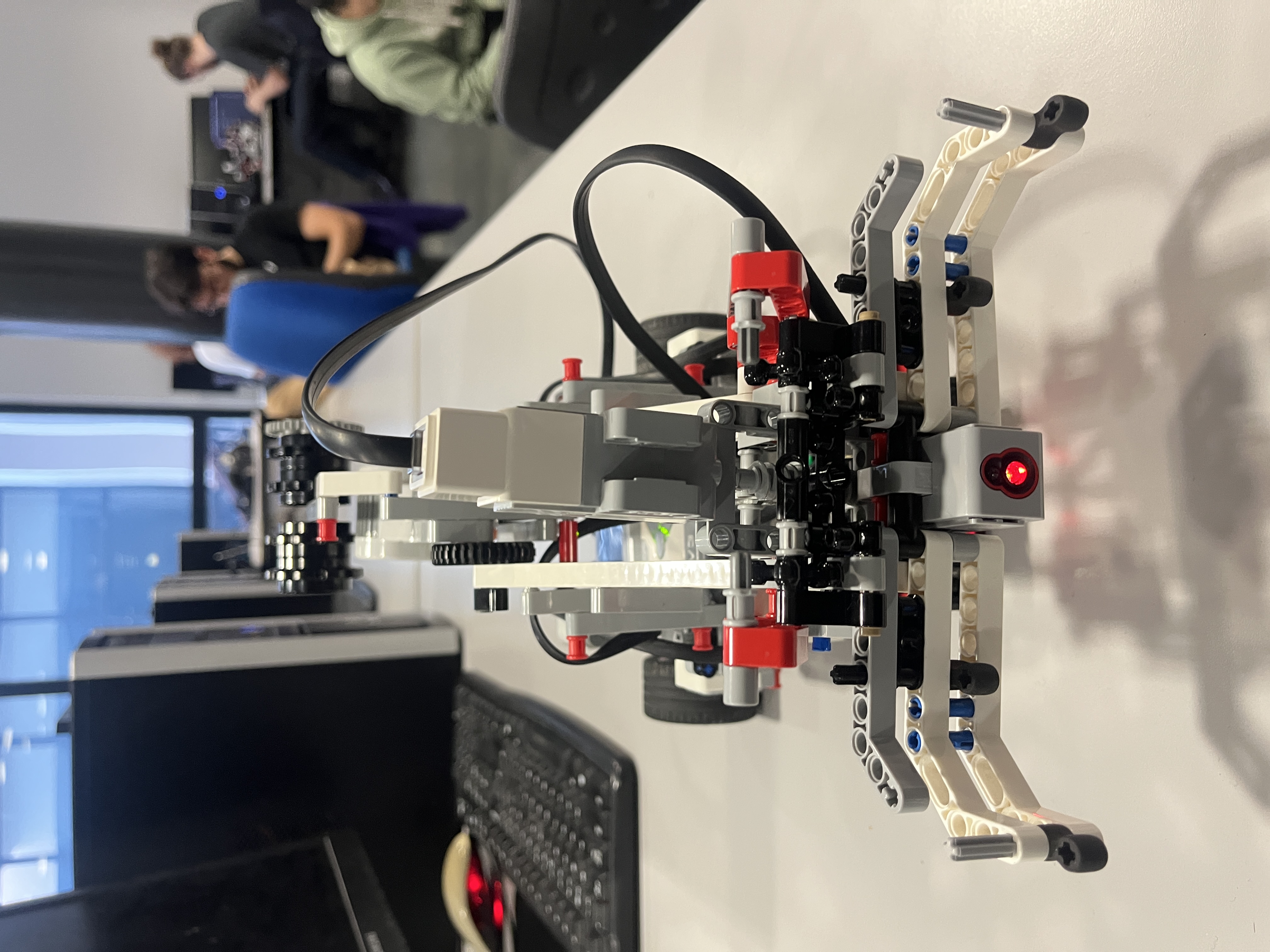
Figure 1: Front View
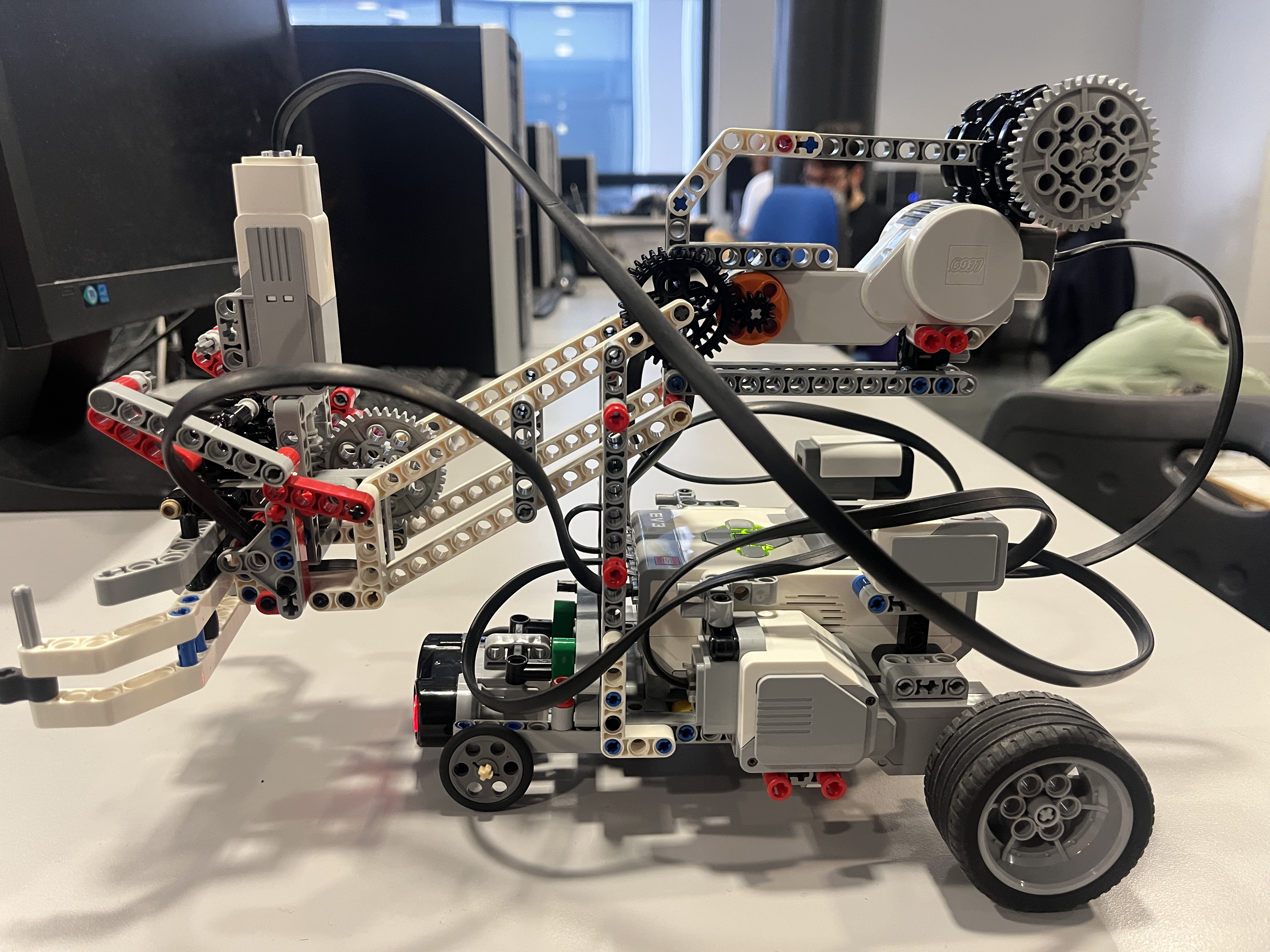
Figure 2: Side Profile
Hardware Specifications
🧠 The Core
- Controller: LEGO Mindstorms EV3 Brick
- OS: ev3dev-c (Debian Linux)
👀 Sensors (Inputs)
| Component | Port | Description & Usage |
|---|---|---|
| Ultrasonic Sensor | In 1 | Range Finding: Detects walls and opponent robots up to 250cm |
| Gyro Sensor | In 3 | Stabilization: Provides heading data for straight-line driving and precise turns |
| Color Sensor | In 4 | Target Acquisition: Identifies the red objects |
🦾 Actuators (Outputs)
| Component | Port | Description & Usage |
|---|---|---|
| Large Motor (Left) | Out D | Primary drive train (Differential Drive) |
| Large Motor (Right) | Out A | Primary drive train (Differential Drive) |
| Medium Motor | Out B | A geared grabber mechanism to grab the objects in place |
| Medium Motor | Out C | A forklift mechanism to elevate the object on the claw |